





Safe Robot Learning
Learning can be used to improve the performance of a robotic system in a complex environment. However, providing safety guarantees during the...
Semantic Control for Robotics
For robots to safely interact with people and the real world, they need the capability to not only perceive but also understand their surroundings in...
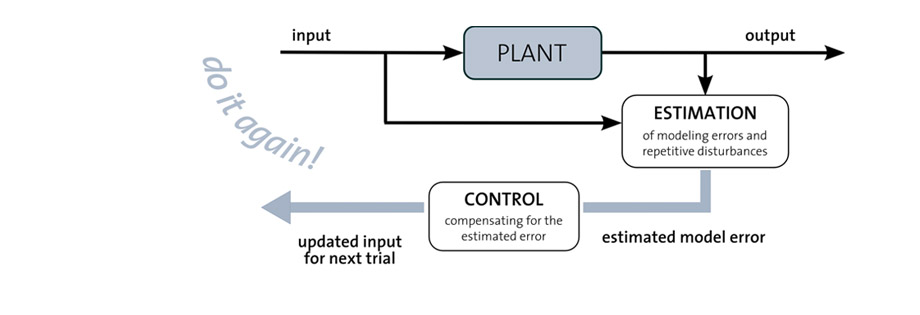
Foundations of Robot Learning, Control, and Planning
Learning algorithms hold great promise for improving a robot's performance whenever a-priori models are not sufficiently accurate. We have developed...
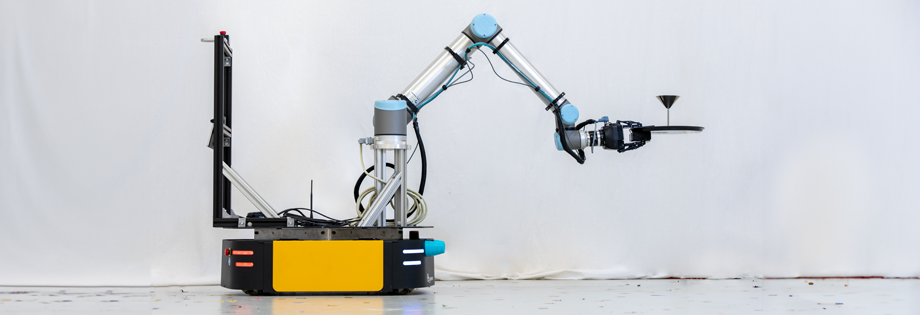
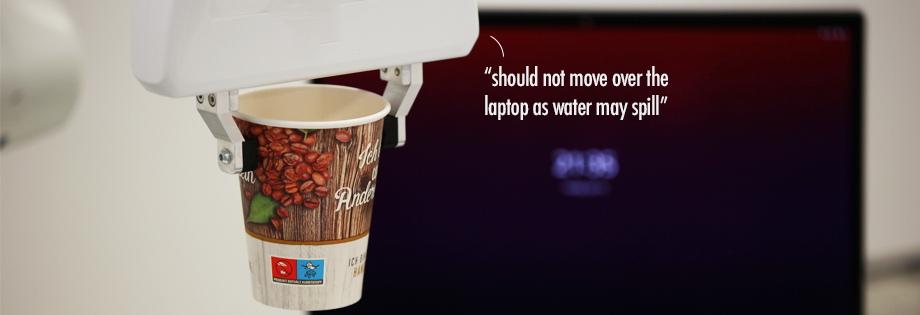
Mobile Manipulation
We enable robots to move around the environment while manipulating and interacting with objects. Our work includes nonprehensile manipulation, which...
Mapping and Localization in Changing Environments
A key underpinning factor for the reliable operation of any autonomous system is the ability to map and localize itself against the map of an...
Deep Neural Networks and Foundation Models for Robotics
We aim to develop a platform-independent approach that utilizes deep neural networks (DNNs) to enhance classical controllers to achieve...
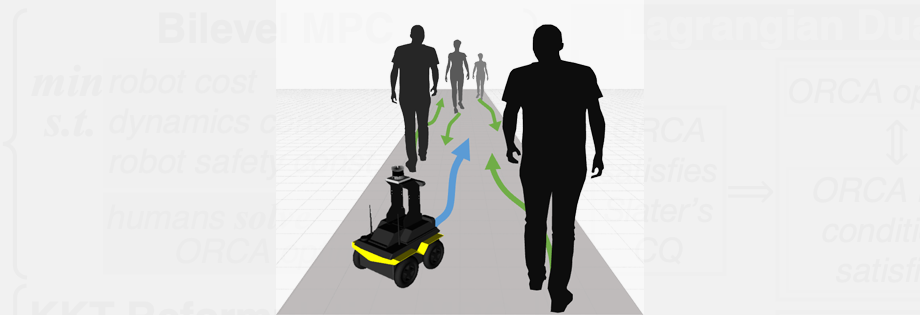
Crowd Navigation
Robots are required to navigate among humans to achieve a variety of service tasks, such as food delivery and autonomous wheelchair navigation....

Self-Driving Vehicles
As part of the SAE Autodrive Challenge, students in our lab will be working on designing, developing, and testing a self-driving car over the next...
Multiagent Coordination and Learning
There are tasks that cannot be done by a single robot alone. A group of robots collaborating on a task has the potential of being highly efficient,...

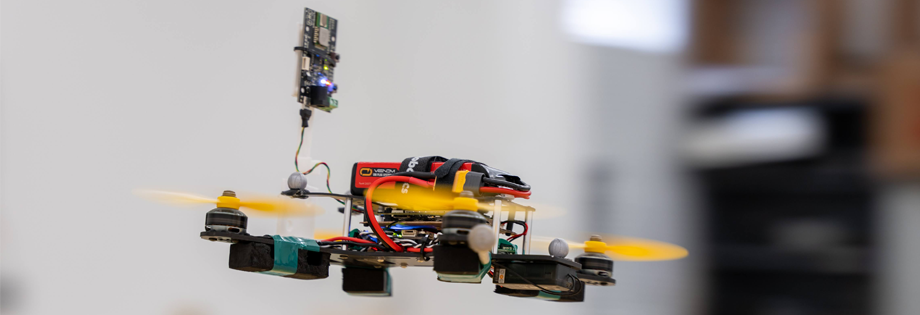
Vision-Based Autonomous Flight
We use vision to achieve robot localization and navigation without using external infrastructure. Our ground robot experiments localize based on 3D...
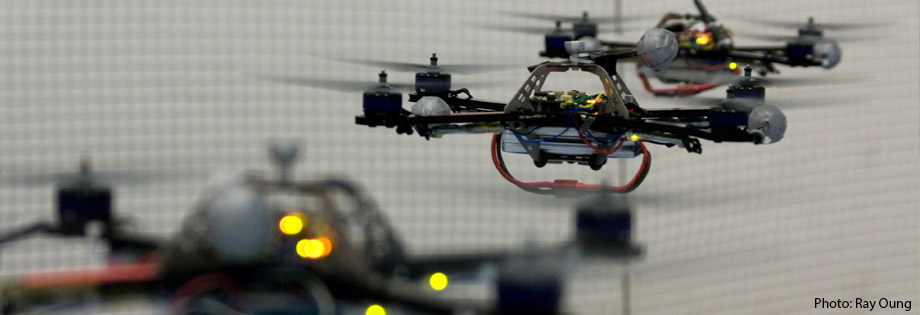
Music in Motion: Dancing Quadrocopters
This project features agile, multi-vehicle flight performances that are designed and executed to music. We develop motion planning, control and...

Aerial Robotics Applications
This series of projects aims to address the critical challenges of deploying aerial robotics in various applications or industries. Mining This...