
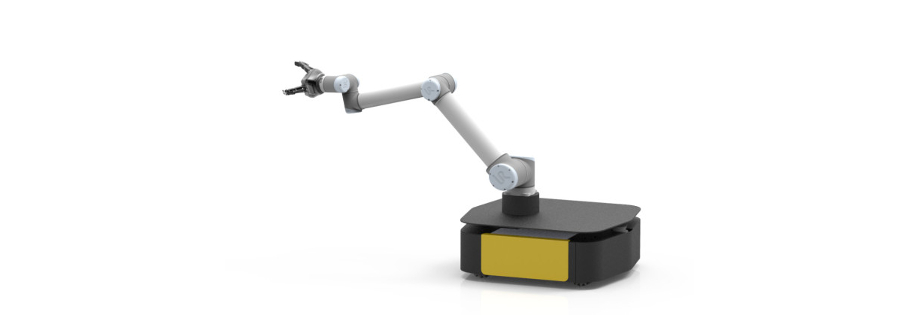
Automated Data Capture in Indoor Construction Environments
Reliable objective (i.e., cost, time, and scope) assessment of architecture, engineering, and construction (AEC) projects requires reliable data with...


Safe and Robust Robot Learning in Unknown Environments
Learning can be used to improve the performance of a robotic system in a complex environment. However, providing safety guarantees during the...
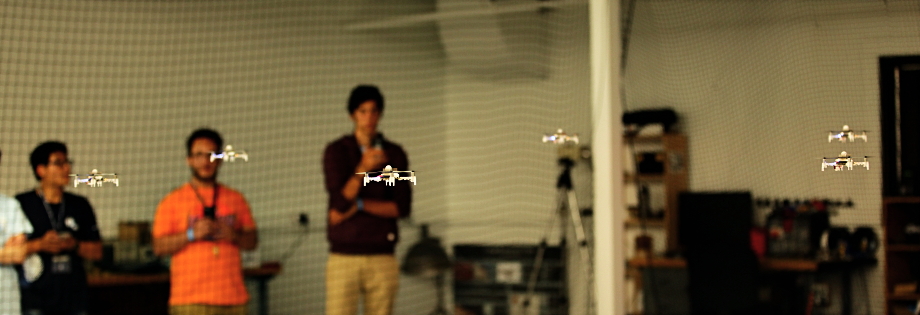
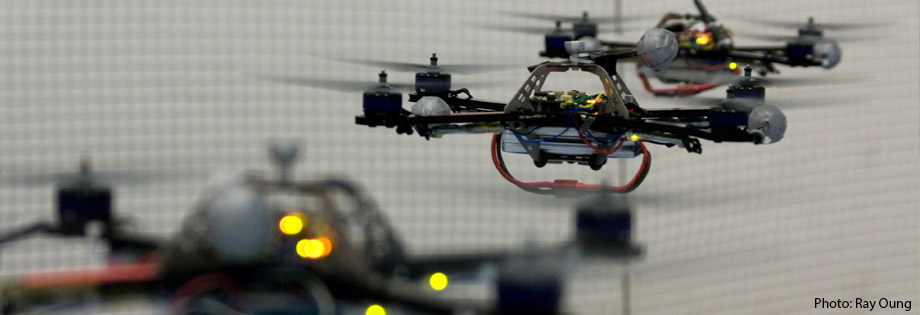
Robotic Swarms
There are tasks that cannot be done by a single robot alone. A group of robots collaborating on a task has the potential of being highly efficient,...

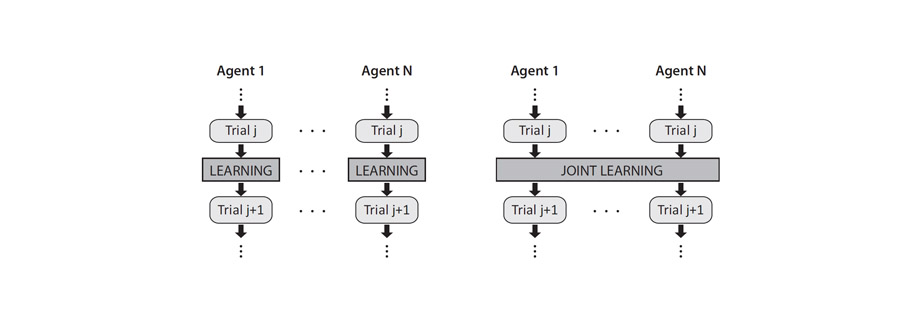
Efficient Multi-Task and Multi-Robot Learning
Can robots learn from each other? Is sharing information between robots beneficial? Robots should be able to learn from few demonstrations of a task,...

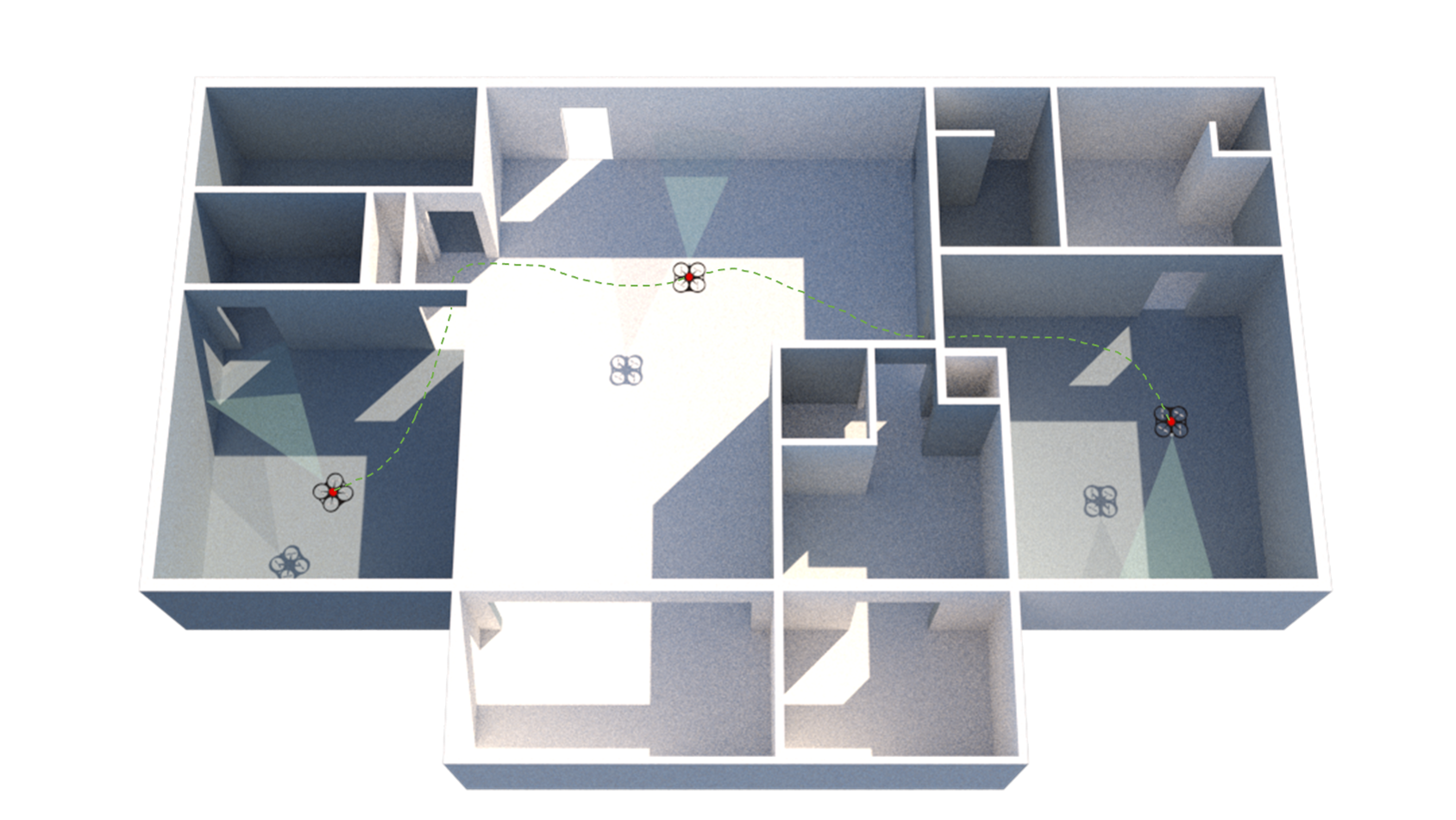
Vision-Based Flying and Driving
We use vision to achieve robot localization and navigation without using external infrastructure. Our ground robot experiments localize based on 3D...
Music in Motion: Dancing Quadrocopters
This project features agile, multi-vehicle flight performances that are designed and executed to music. We develop motion planning, control and...

Aerial Robotics for Mining
In this project we aim to develop UAV based monitoring and data acquisition solutions that enable efficient and timely decision-making for...
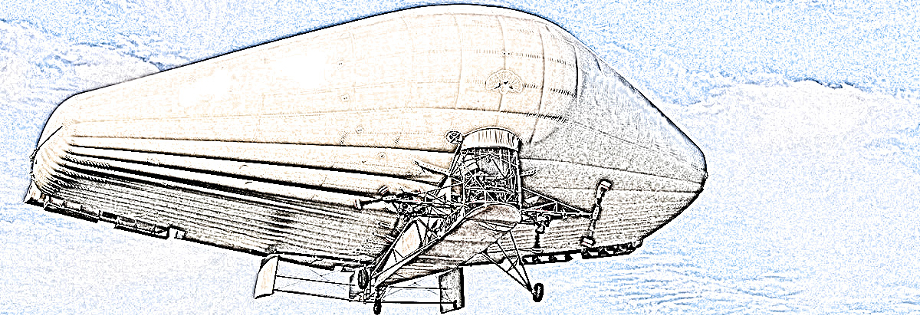
Counter-Gust System for Hybrid Aerial Vehicles
The project objective of this project is to design and implement an automatic crosswind stabilization system for a new, hybrid aerial vehicle...

Aerial and Ground Robot Racing
This project explores the physical limits of ground and aerial robots. When operating robots in these regimes, unknown dynamic effects (for example,...

Waterfly: Aerial Environmental Monitoring
We developed a swarm of drones that can communicate with each other and help with data retrieval for environmental monitoring. The drones fly in sync...
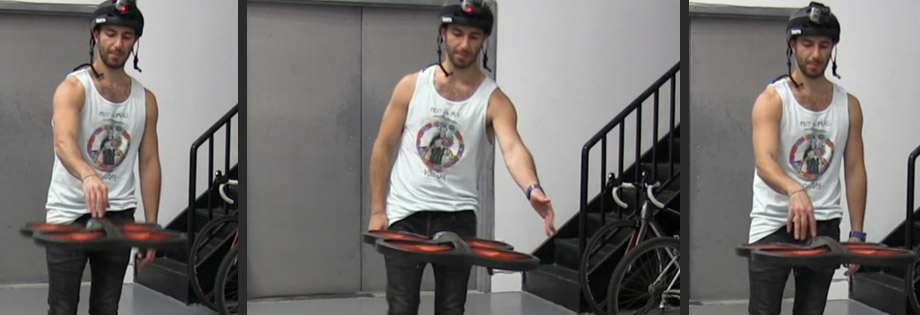
The Flying Drum Machine
We developed a quadrotor aerial vehicle that can be used as a musical instrument. Using the idea of interactions based on physical contact, a system...