
Automated Data Capture in Indoor Construction Environments
Reliable objective (i.e., cost, time, and scope) assessment of architecture, engineering, and construction (AEC) projects requires reliable data with respect to the as-built conditions. Manual data acquisition in such continually changing environments is laborious, costly, and error-prone. This project aims to develop an automated data capture system for indoor construction environments using multi-sensor autonomous unmanned aerial vehicles (UAVs). This requires the use of autonomous navigation, localization, and mapping algorithms in a GPS-denied indoor environment while incorporating the information available in the building information model (BIM). The application of such a system includes automated visual progress monitoring, visual inspection, quality control, and BIM updating.
Related Publications
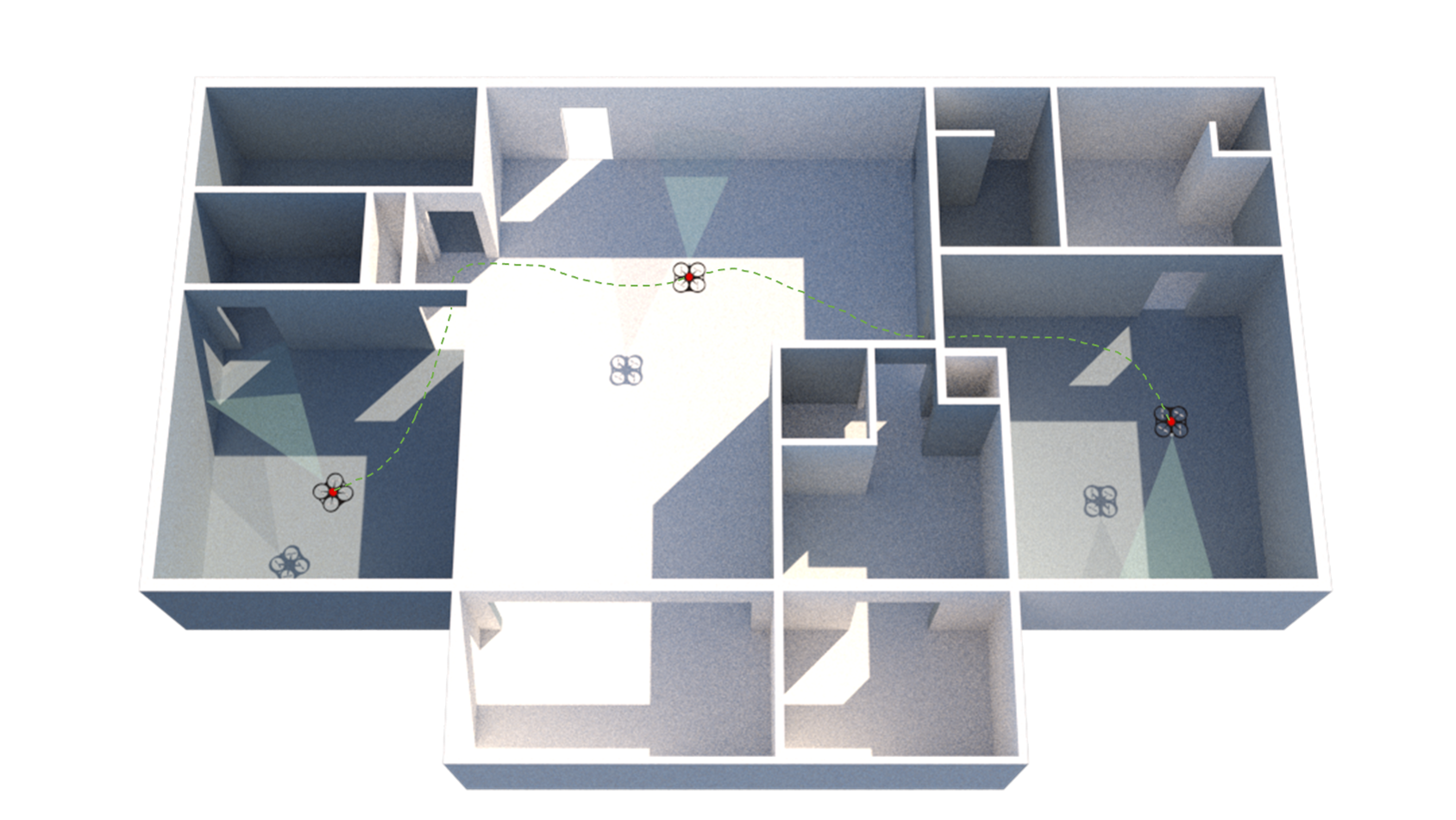
Automated visual data collection using autonomous unmanned aerial vehicles (UAVs) can improve the accessibility and accuracy of the frequent data required for indoor construction inspections and tracking. However, robust localization, as a critical enabler for autonomy, is challenging in ever-changing, cluttered, GPS-denied indoor construction environments. Rapid alterations and repetitive low-texture areas on indoor construction sites jeopardize the reliability of typical vision-based solutions. This research proposes a tag-based visual-inertial localization method for off-the-shelf UAVs with only a camera and an inertial measurement unit (IMU). Given that tag locations are known in the BIM, the proposed method estimates the UAV’s global pose by fusing inertial data and tag measurements using an on-manifold extended Kalman filter (EKF). The root-mean-square error (RMSE) achieved in our experiments in laboratory and simulation, being as low as 2 − 5 cm, indicates the potential of deploying the proposed method for autonomous navigation of low-cost UAVs in indoor construction environments.
@article{kayhani-autocon22,
author = {Navid Kayhani and Wenda Zhao and Brenda McCabe and Angela P. Schoellig},
title = {Tag-based visual-inertial localization of unmanned aerial vehicles in indoor construction environments using an on-manifold extended {Kalman} filter},
journal = {{Automation in Construction}},
year = {2022},
volume = {135},
pages = {104112},
issn = {0926-5805},
doi = {https://doi.org/10.1016/j.autcon.2021.104112},
url = {https://www.sciencedirect.com/science/article/pii/S092658052100563X},
keywords = {Indoor localization, Unmanned aerial vehicle, Extended Kalman filter, SE(3), On-manifold state estimation, Autonomous navigation, Building information model, Construction robotics, AprilTag},
abstract = {Automated visual data collection using autonomous unmanned aerial vehicles (UAVs) can improve the accessibility and accuracy of the frequent data required for indoor construction inspections and tracking. However, robust localization, as a critical enabler for autonomy, is challenging in ever-changing, cluttered, GPS-denied indoor construction environments. Rapid alterations and repetitive low-texture areas on indoor construction sites jeopardize the reliability of typical vision-based solutions. This research proposes a tag-based visual-inertial localization method for off-the-shelf UAVs with only a camera and an inertial measurement unit (IMU). Given that tag locations are known in the BIM, the proposed method estimates the UAV's global pose by fusing inertial data and tag measurements using an on-manifold extended Kalman filter (EKF). The root-mean-square error (RMSE) achieved in our experiments in laboratory and simulation, being as low as 2 − 5 cm, indicates the potential of deploying the proposed method for autonomous navigation of low-cost UAVs in indoor construction environments.}
} Stochastic modeling of tag installation error for robust on-manifold tag-based visual-inertial localizationN. Kayhani, B. McCabe, and A. P. Schoelligin Proc. of the Canadian Society of Civil Engineering Annual Conference (CSCE), 2022. Accepted.
![]()
![]()
![]()
![]()
Autonomous mobile robots, including unmanned aerial vehicles (UAVs), have received significant attention for their applications in construction. These platforms have great potential to automate and enhance the quality and frequency of the required data for many tasks such as construction schedule updating, inspections, and monitoring. Robust localization is a critical enabler for reliable deployments of autonomous robotic platforms. Automated robotic solutions rely mainly on the global positioning system (GPS) for outdoor localization. However, GPS signals are denied indoors, and pre-built environment maps are often used for indoor localization. This entails generating high-quality maps by teleoperating the mobile robot in the environment. Not only is this approach time-consuming and tedious, but it also is unreliable in indoor construction settings. Layout changes with construction progress, requiring frequent mapping sessions to support autonomous missions. Moreover, the effectiveness of vision-based solutions relying on visual features are highly impacted in low texture and repetitive areas on site. To address these challenges, we previously proposed a low-cost, lightweight tag-based visual-inertial localization method using AprilTags. Tags, in this method, are paper printable landmarks with known sizes and locations, representing the environment’s quasi-map. Since tag placement/replacement is a manual process, it is subject to human errors. In this work, we study the impact of human error in the manual tag installation process and propose a stochastic approach to account for this uncertainty using the Lie group theory. Employing Monte Carlo simulation, we experimentally show that the proposed stochastic model incorporated in our on-manifold formulation improves the robustness and accuracy of tag-based localization against inevitable imperfections in manual tag installation on site.
@INPROCEEDINGS{kayhani-csce22,
author={Navid Kayhani and Brenda McCabe and Angela P. Schoellig},
booktitle={{Proc. of the Canadian Society of Civil Engineering Annual Conference (CSCE)}},
title={Stochastic modeling of tag installation error for robust on-manifold tag-based visual-inertial localization},
year={2022},
note={Accepted},
urlvideo = {https://youtu.be/2frTKgOwbf4},
abstract = {Autonomous mobile robots, including unmanned aerial vehicles (UAVs), have received significant attention for their applications in construction. These platforms have great potential to automate and enhance the quality and frequency of the required data for many tasks such as construction schedule updating, inspections, and monitoring. Robust localization is a critical enabler for reliable deployments of autonomous robotic platforms. Automated robotic solutions rely mainly on the global positioning system (GPS) for outdoor localization. However, GPS signals are denied indoors, and pre-built environment maps are often used for indoor localization. This entails generating high-quality maps by teleoperating the mobile robot in the environment. Not only is this approach time-consuming and tedious, but it also is unreliable in indoor construction settings. Layout changes with construction progress, requiring frequent mapping sessions to support autonomous missions. Moreover, the effectiveness of vision-based solutions relying on visual features are highly impacted in low texture and repetitive areas on site. To address these challenges, we previously proposed a low-cost, lightweight tag-based visual-inertial localization method using AprilTags. Tags, in this method, are paper printable landmarks with known sizes and locations, representing the environment’s quasi-map. Since tag placement/replacement is a manual process, it is subject to human errors. In this work, we study the impact of human error in the manual tag installation process and propose a stochastic approach to account for this uncertainty using the Lie group theory. Employing Monte Carlo simulation, we experimentally show that the proposed stochastic model incorporated in our on-manifold formulation improves the robustness and accuracy of tag-based localization against inevitable imperfections in manual tag installation on site.}
} ![]() Tag-based indoor localization of uavs in construction environments: opportunities and challenges in practiceN. Kayhani, B. McCabe, A. Abdelaal, A. Heins, and A. P. Schoelligin Proc. of the Construction Research Congress, 2020, p. 226–235.
Tag-based indoor localization of uavs in construction environments: opportunities and challenges in practiceN. Kayhani, B. McCabe, A. Abdelaal, A. Heins, and A. P. Schoelligin Proc. of the Construction Research Congress, 2020, p. 226–235.
![]()
![]()
![]()
![]()
Automated visual inspection and progress monitoring of construction projects using different robotic platforms have recently attracted scholars’ attention. Unmanned/unoccupied aerial vehicles (UAVs), however, are more and more being used for this purpose because of their maneuverability and perspective capabilities. Although a multi-sensor autonomous UAV can enhance the collection of informative data in constantly-evolving construction environments, autonomous flight and navigation of UAVs are challenging in indoor environments where the global positioning system (GPS) might be denied or unreliable. In such continually changing environments, the limited external infrastructure and the existence of unknown obstacles are two key challenges that need to be addressed. On the other hand, construction indoor environments are not fully unknown, as a progressively updating building information model (BIM) provides valuable prior knowledge about the GPS-denied environment. This fact can potentially create unique opportunities to facilitate the indoor navigation process in construction projects. The authors have previously shown the potentials of AprilTag fiducial markers for localization of a camera-equipped UAV in various controlled experimental setups in the laboratory. In this paper, we investigate the opportunities and challenges of using tag-based localization techniques in real-world construction environments.
@INPROCEEDINGS{kayhani-crc20,
author={Navid Kayhani and Brenda McCabe and Ahmed Abdelaal and Adam Heins and Angela P. Schoellig},
booktitle={{Proc. of the Construction Research Congress}},
title={Tag-based Indoor Localization of UAVs in Construction Environments: Opportunities and Challenges in Practice},
year={2020},
pages={226--235},
doi={10.1061/9780784482865.025},
urllink = {https://ascelibrary.org/doi/epdf/10.1061/9780784482865.025},
abstract = {Automated visual inspection and progress monitoring of construction projects using different robotic platforms have recently attracted scholars' attention. Unmanned/unoccupied aerial vehicles (UAVs), however, are more and more being used for this purpose because of their maneuverability and perspective capabilities. Although a multi-sensor autonomous UAV can enhance the collection of informative data in constantly-evolving construction environments, autonomous flight and navigation of UAVs are challenging in indoor environments where the global positioning system (GPS) might be denied or unreliable. In such continually changing environments, the limited external infrastructure and the existence of unknown obstacles are two key challenges that need to be addressed. On the other hand, construction indoor environments are not fully unknown, as a progressively updating building information model (BIM) provides valuable prior knowledge about the GPS-denied environment. This fact can potentially create unique opportunities to facilitate the indoor navigation process in construction projects. The authors have previously shown the potentials of AprilTag fiducial markers for localization of a camera-equipped UAV in various controlled experimental setups in the laboratory. In this paper, we investigate the opportunities and challenges of using tag-based localization techniques in real-world construction environments.}
} ![]() Improved tag-based indoor localization of UAVs using extended Kalman filterN. Kayhani, A. Heins, W. Zhao, M. Nahangi, B. McCabe, and A. P. Schoelligin Proc. of the International Symposium on Automation and Robotics in Construction (ISARC), 2019, p. 624–631.
Improved tag-based indoor localization of UAVs using extended Kalman filterN. Kayhani, A. Heins, W. Zhao, M. Nahangi, B. McCabe, and A. P. Schoelligin Proc. of the International Symposium on Automation and Robotics in Construction (ISARC), 2019, p. 624–631.
![]()
![]()
![]()
Indoor localization and navigation of unmanned aerial vehicles (UAVs) is a critical function for autonomous flight and automated visual inspection of construction elements in continuously changing construction environments. The key challenge for indoor localization and navigation is that the global positioning system (GPS) signal is not sufficiently reliable for state estimation. Having used the AprilTag markers for indoor localization, we showed a proof-of-concept that a camera-equipped UAV can be localized in a GPS-denied environment; however, the accuracy of the localization was inadequate in some situations. This study presents the implementation and performance assessment of an Extended Kalman Filter (EKF) for improving the estimation process of a previously developed indoor localization framework using AprilTag markers. An experimental set up is used to assess the performance of the updated estimation process in comparison to the previous state estimation method and the ground truth data. Results show that the state estimation and indoor localization are improved substantially using the EKF. To have a more robust estimation, we extract and fuse data from multiple tags. The framework can now be tested in real-world environments given that our continuous localization is sufficiently robust and reliable.
@INPROCEEDINGS{kayhani-isarc19,
author = {Navid Kayhani and Adam Heins and Wenda Zhao and Mohammad Nahangi and Brenda McCabe and Angela P. Schoellig},
title = {Improved Tag-based Indoor Localization of {UAV}s Using Extended {Kalman} Filter},
booktitle = {{Proc. of the International Symposium on Automation and Robotics in Construction (ISARC)}},
year = {2019},
pages = {624--631},
doi={10.22260/ISARC2019/0083},
abstract = {Indoor localization and navigation of unmanned aerial vehicles (UAVs) is a critical function for autonomous flight and automated visual inspection of construction elements in continuously changing construction environments. The key challenge for indoor localization and navigation is that the global positioning system (GPS) signal is not sufficiently reliable for state estimation. Having used the AprilTag markers for indoor localization, we showed a proof-of-concept that a camera-equipped UAV can be localized in a GPS-denied environment; however, the accuracy of the localization was inadequate in some situations. This study presents the implementation and performance assessment of an Extended Kalman Filter (EKF) for improving the estimation process of a previously developed indoor localization framework using AprilTag markers. An experimental set up is used to assess the performance of the updated estimation process in comparison to the previous state estimation method and the ground truth data. Results show that the state estimation and indoor localization are improved substantially using the EKF. To have a more robust estimation, we extract and fuse data from multiple tags. The framework can now be tested in real-world environments given that our continuous localization is sufficiently robust and reliable.},
} Automated localization of UAVs in GPS-denied indoor construction environments using fiducial markersM. Nahangi, A. Heins, B. McCabe, and A. P. Schoelligin Proc. International Symposium on Automation and Robotics in Construction (ISARC), 2018, p. 88–94.
![]()
![]()
![]()
Unmanned Aerial Vehicles (UAVs) have opened a wide range of opportunities and applications in different sectors including construction. Such applications include: 3D mapping from 2D images and video footage, automated site inspection, and performance monitoring. All of the above-mentioned applications perform well outdoors where GPS is quite reliable for localization and navigation of UAV’s. Indoor localization and consequently indoor navigation have remained relatively untapped, because GPS is not sufficiently reliable and accurate in indoor environments. This paper presents a method for localization of aerial vehicles in GPS-denied indoor construction environments. The proposed method employs AprilTags that are linked to previously known coordinates in the 3D building information model (BIM). Using cameras on-board the UAV and extracting the transformation from the tag to the camera’s frame, the UAV can be localized on the site. It can then use the previously computed information for navigation between critical locations on construction sites. We use an experimental setup to verify and validate the proposed method by comparing with an indoor localization system as the ground truth. Results show that the proposed method is sufficiently accurate to perform indoor navigation. Moreover, the method does not intensify the complexity of the construction execution as the tags are simply printed and placed on available surfaces at the construction site.
@INPROCEEDINGS{nahangi-isarc18,
author={Mohammad Nahangi and Adam Heins and Brenda McCabe and Angela P. Schoellig},
title={Automated Localization of {UAV}s in {GPS}-Denied Indoor Construction Environments Using Fiducial Markers},
booktitle = {{Proc. International Symposium on Automation and Robotics in Construction (ISARC)}},
year = {2018},
pages={88--94},
abstract = {Unmanned Aerial Vehicles (UAVs) have opened a wide range of opportunities and applications in different sectors including construction. Such applications include: 3D mapping from 2D images and video footage, automated site inspection, and performance monitoring. All of the above-mentioned applications perform well outdoors where GPS is quite reliable for localization and navigation of UAV’s. Indoor localization and consequently indoor navigation have remained relatively untapped, because GPS is not sufficiently reliable and accurate in indoor environments. This paper presents a method for localization of aerial vehicles in GPS-denied indoor construction environments. The proposed method employs AprilTags that are linked to previously known coordinates in the 3D building information model (BIM). Using cameras on-board the UAV and extracting the transformation from the tag to the camera’s frame, the UAV can be localized on the site. It can then use the previously computed information for navigation between critical locations on construction sites. We use an experimental setup to verify and validate the proposed method by comparing with an indoor localization system as the ground truth. Results show that the proposed method is sufficiently accurate to perform indoor navigation. Moreover, the method does not intensify the complexity of the construction execution as the tags are simply printed and placed on available surfaces at the construction site.},
}