
Crowd Navigation
Robots are required to navigate among humans to achieve a variety of service tasks, such as food delivery and autonomous wheelchair navigation. However, this is a challenging task: the robot needs to predict and react to human motions while avoiding collisions and making progress towards its goal. In this project, we aim to develop a variety of control, planning, and prediction methods to tackle safe robotic crowd navigation.
Related Publications
To navigate crowds without collisions, robots must interact with humans by forecasting their future motion and reacting accordingly. While learning-based prediction models have shown success in generating likely human trajectory predictions, integrating these stochastic models into a robot controller presents several challenges. The controller needs to account for interactive coupling between planned robot motion and human predictions while ensuring both predictions and robot actions are safe (i.e. collision-free). To address these challenges, we present a receding horizon crowd navigation method for single-robot multi-human environments. We first propose a diffusion model to generate joint trajectory predictions for all humans in the scene. We then incorporate these multi-modal predictions into a SICNav Bilevel MPC problem that simultaneously solves for a robot plan (upper-level) and acts as a safety filter to refine the predictions for non-collision (lower-level). Combining planning and prediction refinement into one bilevel problem ensures that the robot plan and human predictions are coupled. We validate the open-loop trajectory prediction performance of our diffusion model on the commonly used ETH/UCY benchmark and evaluate the closed-loop performance of our robot navigation method in simulation and extensive real-robot experiments demonstrating safe, efficient, and reactive robot motion.
@ARTICLE{samavi-ral25,
title = {{SICNav-Diffusion}: Safe and Interactive Crowd Navigation with Diffusion Trajectory Predictions},
author = {Sepehr Samavi and Anthony Lem and Fumiaki Sato and Sirui Chen and Qiao Gu and Keijiro Yano and Angela P. Schoellig and Florian Shkurti},
journal = {{IEEE Robotics and Automation Letters (RA-L)}},
year={2025},
volume={10},
number={9},
pages={8738-8745},
doi={10.1109/LRA.2025.3585713},
urllink = {https://sepehr.fyi/projects/sicnav_diffusion},
urlcode = {https://github.com/sepsamavi/safe-interactive-crowdnav},
urlvideo = {tiny.cc/sicnav_diffusion},
abstract={To navigate crowds without collisions, robots must interact with humans by forecasting their future motion and reacting accordingly. While learning-based prediction models have shown success in generating likely human trajectory predictions, integrating these stochastic models into a robot controller presents several challenges. The controller needs to account for interactive coupling between planned robot motion and human predictions while ensuring both predictions and robot actions are safe (i.e. collision-free). To address these challenges, we present a receding horizon crowd navigation method for single-robot multi-human environments. We first propose a diffusion model to generate joint trajectory predictions for all humans in the scene. We then incorporate these multi-modal predictions into a SICNav Bilevel MPC problem that simultaneously solves for a robot plan (upper-level) and acts as a safety filter to refine the predictions for non-collision (lower-level). Combining planning and prediction refinement into one bilevel problem ensures that the robot plan and human predictions are coupled. We validate the open-loop trajectory prediction performance of our diffusion model on the commonly used ETH/UCY benchmark and evaluate the closed-loop performance of our robot navigation method in simulation and extensive real-robot experiments demonstrating safe, efficient, and reactive robot motion.}
} ![]() SICNav: safe and interactive crowd navigation using model predictive control and bilevel optimizationS. Samavi, J. R. Han, F. Shkurti, and A. P. SchoelligIEEE Transactions on Robotics, vol. 41, p. 801–818, 2024.
SICNav: safe and interactive crowd navigation using model predictive control and bilevel optimizationS. Samavi, J. R. Han, F. Shkurti, and A. P. SchoelligIEEE Transactions on Robotics, vol. 41, p. 801–818, 2024.
![]()
![]()
![]()
![]()
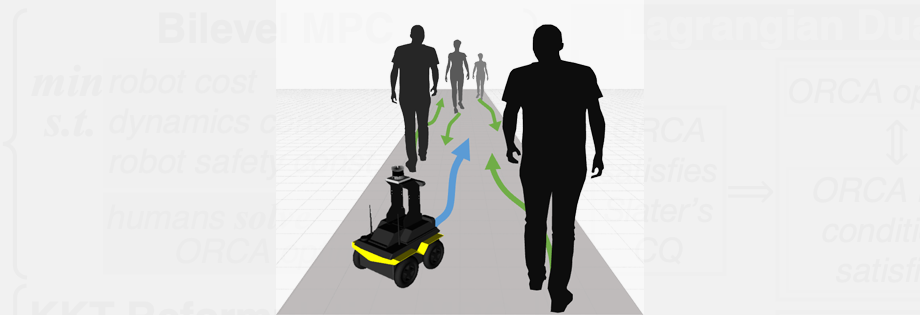
Robots need to predict and react to human motions to navigate through a crowd without collisions. Many existing methods decouple prediction from planning, which does not account for the interaction between robot and human motions and can lead to the robot getting stuck. We propose SICNav, a Model Predictive Control (MPC) method that jointly solves for robot motion and predicted crowd motion in closed-loop. We model each human in the crowd to be following an Optimal Reciprocal Collision Avoidance (ORCA) scheme and embed that model as a constraint in the robot’s local planner, resulting in a bilevel nonlinear MPC optimization problem. We use a KKT-reformulation to cast the bilevel problem as a single level and use a nonlinear solver to optimize. Our MPC method can influence pedestrian motion while explicitly satisfying safety constraints in a single-robot multi-human environment. We analyze the performance of SICNav in two simulation environments and indoor experiments with a real robot to demonstrate safe robot motion that can influence the surrounding humans. We also validate the trajectory forecasting performance of ORCA on a human trajectory dataset. Code: https://github.com/sepsamavi/safe-interactive-crowdnav.git.
@ARTICLE{samavi-tro23,
title = {{SICNav}: Safe and Interactive Crowd Navigation using Model Predictive Control and Bilevel Optimization},
author = {Sepehr Samavi and James R. Han and Florian Shkurti and Angela P. Schoellig},
journal = {{IEEE Transactions on Robotics}},
volume = {41},
number = {},
pages = {801--818},
year = {2024},
urllink = {https://arxiv.org/abs/2310.10982},
doi = {10.1109/TRO.2024.3484634},
abstract = {Robots need to predict and react to human motions to navigate through a crowd without collisions. Many existing methods decouple prediction from planning, which does not account for the interaction between robot and human motions and can lead to the robot getting stuck. We propose SICNav, a Model Predictive Control (MPC) method that jointly solves for robot motion and predicted crowd motion in closed-loop. We model each human in the crowd to be following an Optimal Reciprocal Collision Avoidance (ORCA) scheme and embed that model as a constraint in the robot's local planner, resulting in a bilevel nonlinear MPC optimization problem. We use a KKT-reformulation to cast the bilevel problem as a single level and use a nonlinear solver to optimize. Our MPC method can influence pedestrian motion while explicitly satisfying safety constraints in a single-robot multi-human environment. We analyze the performance of SICNav in two simulation environments and indoor experiments with a real robot to demonstrate safe robot motion that can influence the surrounding humans. We also validate the trajectory forecasting performance of ORCA on a human trajectory dataset. Code: https://github.com/sepsamavi/safe-interactive-crowdnav.git.}
}